
溜井智能破碎系统融合采用物联网、人工智能、模糊控制等先进技术,实现溜井口格筛大块矿石自动识别、机械臂自动破碎及多装备集中控制功能,常规作业全自动运行,异常作业仅需通过一套控制平台即可实现井下所有破碎机的异常处置,在提升溜井破碎效率、保证作业安全的同时,大幅降低现场人员需求,显著提升系统智能化水平,达到降本增效的的项目目标。
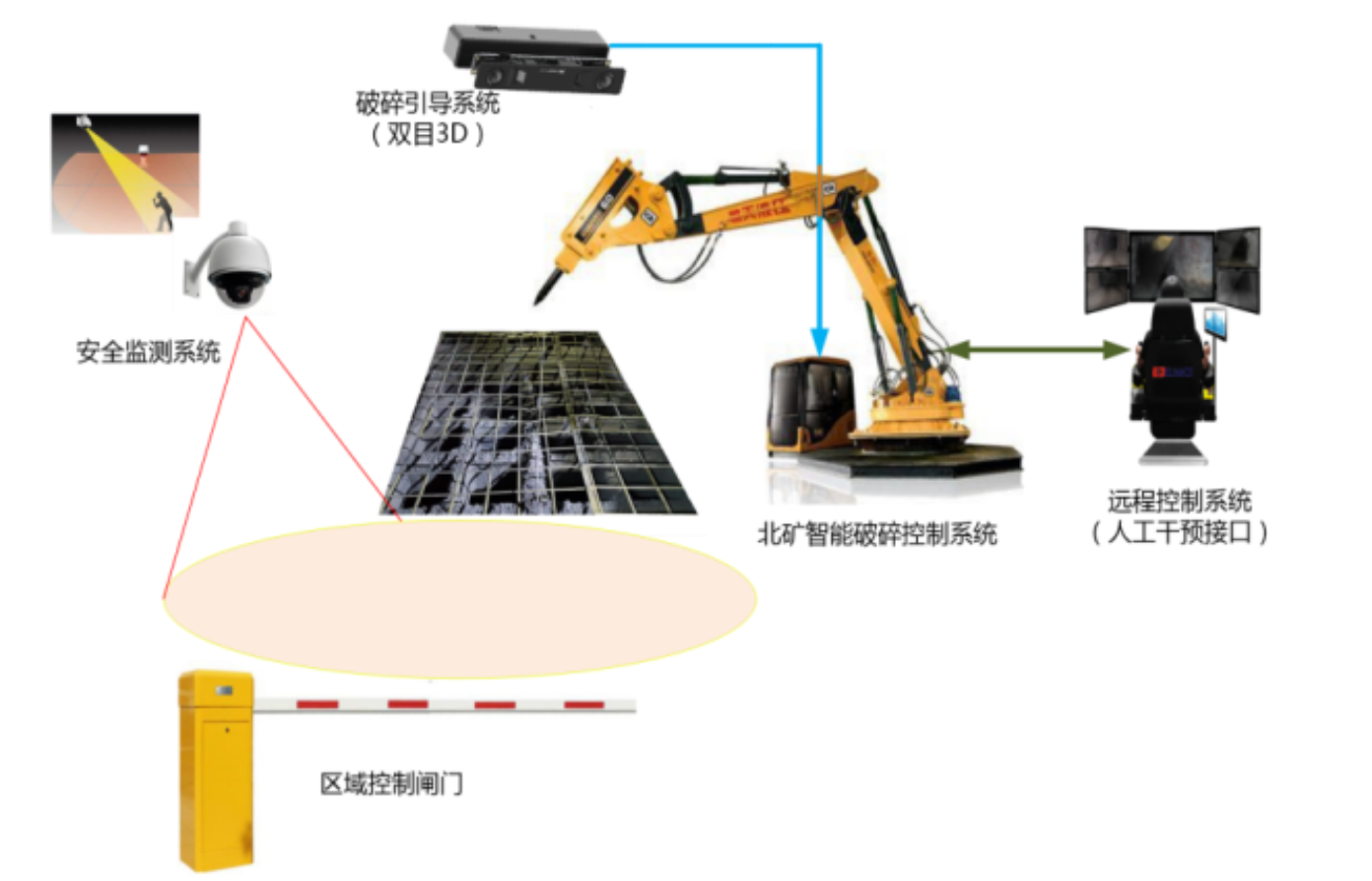
(1)基于机器视觉的溜井格筛矿石堆精准识别技术研究
通过视觉相机采集溜井堆积矿石的三维点云数据,并以红外波段光相机采集溜井堆积矿石的二维强度图像信息,对二维、三维数据进行边缘检测、图块分割及特征提取等叠加处理,实现矿堆、矿块的识别和区分。
(2)固定式破碎机智能化作业引导技术研究
以溜井矿石堆识别和三维定位为基础,对矿石堆形态特征进行分类提取,设计针对各类分布特征的引导机制,建立与矿石、矿堆高度、投影面积、体积相匹配的作业决策模型,确立以筛孔中心、矿石形心和矿堆锥点为作业目标集合,形成以矿堆推算为主,矿石锤击为辅的无人化作业引导模式,优化作业效率。
(3)多传感器融合破碎作业安全防护技术研究
基于多元信息融合技术构建传感器检测与视频图像识别多层冗余监测机制。通过传感器融合技术实现破碎机机械臂负载检测,通过视频信息以深度学习方式进行人、车识别,实现作业区风险源的精准检测,并根据风险类型,设计机械臂应急制动、归位逻辑,保证作业安全,并防止机械臂因外力阻挡损毁动力系统,实现破碎作业全流程的安全防护。
(4)井下固定式破碎机集群控制技术
针对矿山多溜井多固定式分布式作业需求,研制具有多设备无缝切换控制能力的远程操控系统,开发工况设备并发采集与融合处理平台,实现装备作业检测、异常告警、人工-自动作业模式切换、故障诊断、预先维护、作业统计、作业分析、上下游工序联动等功能,提高系统运行效率与精细化管理水平。