
(1)成果简介
目前,我国金属矿产资源开发已进入深部开采阶段,面临采矿技术难度大、成本高、环境恶劣、安全风险大等诸多挑战。智能采矿是破解深部开采发展瓶颈,革新矿产资源开发利用模式,实现矿山绿色、智能、安全、高效高质量转型发展的必由之路,已成为国际采矿领域研究的热点和发展的方向。地下金属矿智能开采关键技术攻克了矿山装备远程遥控与无人驾驶、井下精确定位导航与高可靠无线通信、多装备集群管控、生产运营一体化集控与生产实时调度等难题,形成了有轨电机车无人驾驶系统、凿岩台车远程遥控作业系统、铲运机智能远程控制系统、固定式液压破碎锤远程遥控与智能作业系统、井下无线通信系统、井下“最后一公里”通信与视频监控系统矿用无线巡检测试仪、矿山生产实时调度系统、矿山数字化智能化检测与计量平台等成套技术。技术成果可广泛应用于各类矿山企业,能够大幅提升井下作业装备协同作业能力和生产效率,减少井下现场作业人员50%以上,改善从业人员工作环境,隔离井下安全风险,有效解决我国深部资源开采过程中所遇到的开采难度大、人力紧缺及安全风险大等难题,提高我国地下金属矿山安全生产水平和智能开采水平。
(2)主要性能指标及适用条件范围
适用于地下金属矿山。主要性能指标如下:有轨电机车无人驾驶系统:延长系统作业时间15%以上(以典型示范矿山为例);支持自动/远程遥控/本地多模式控制;具备故障诊断功能;独有信集闭安全逻辑设计,适应各类复杂工况场景。铲运机智能远程控制系统:数据可靠传输,采用无线双网冗余设计,平均切换延迟≤20ms;支持自动/远程遥控/本地多模式控制。井下无线通信系统:支持露天/井下场景;支持快速切换功能,可满足有轨、无轨等不同场景应用需求,平均切换延迟可达30ms以内;通过矿用安全标志认证。固定式液压破碎锤远程遥控与智能作业系统:支持本地/远程遥控/自主(可扩展)多模式控制;低延迟,远程遥控系统延时可达150ms之内。井下“最后一公里”通信与视频监控系统:可实现采区最后1km可靠通信;可实现采区视频监控;可实现AI视频智能分析。矿用无线巡检测试仪:兼容4G、5G、WiFi等多种无线网络制式;支持在线和离线地图的分析与展示,在复杂的矿山环境中也能轻松完成规划和优化网络布局;便携式设计,重量≤1kg;工业级宽温设计,IP68级防护。
(3)成果应用情况
成果获国家科技进步奖二等奖1项、省部级及社会力量奖9项,授权发明专利17项,在宝武集团、江西铜业、金川集团、山东黄金等多家企业进行了应用,助力相关企业近三年新增产值超百亿元,为我国矿山智能化转型提供核心技术支撑。
(4)成果展示

图1 凿岩台车远程遥控作业系统

图2 铲运机智能远程控制系统示意图

图3 固定式液压破碎锤远程遥控系统示意图

图4 固定式液压破碎锤远程遥控与智能作业系统界面

图5 有轨电机车无人驾驶系统
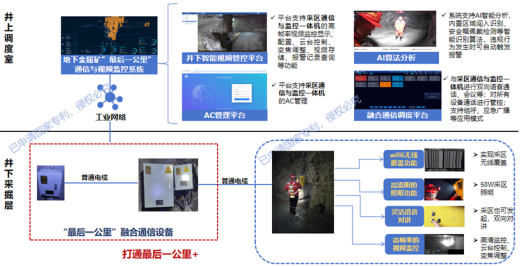
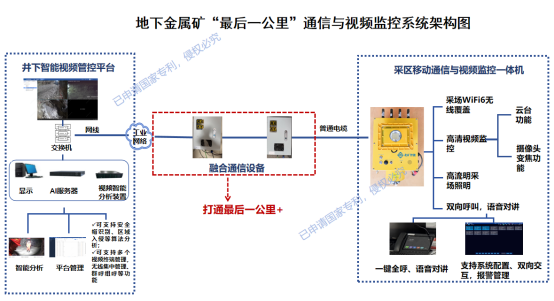
图6 井下“最后一公里”通信与视频监控系统